高招云直播
高招云直播
2025世界机器人大会于8月8日开幕,开幕式上发布了《2025
趋势一
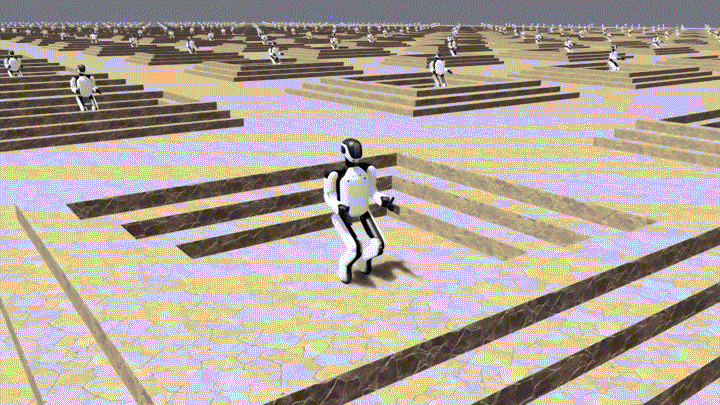
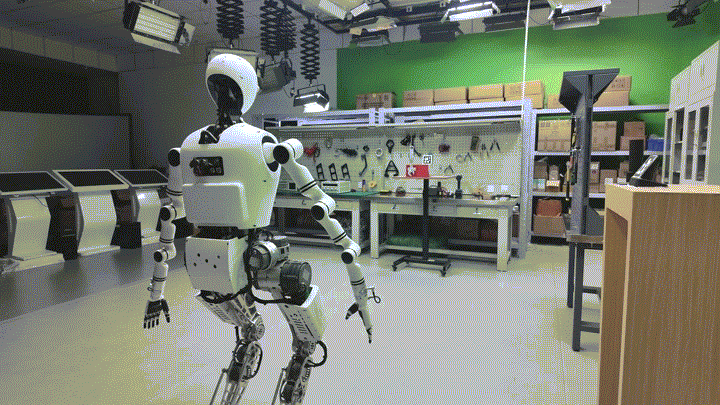
第一,物理实践、物理模拟器与世界模型协同驱动的具身感认知。物理实践是
趋势二
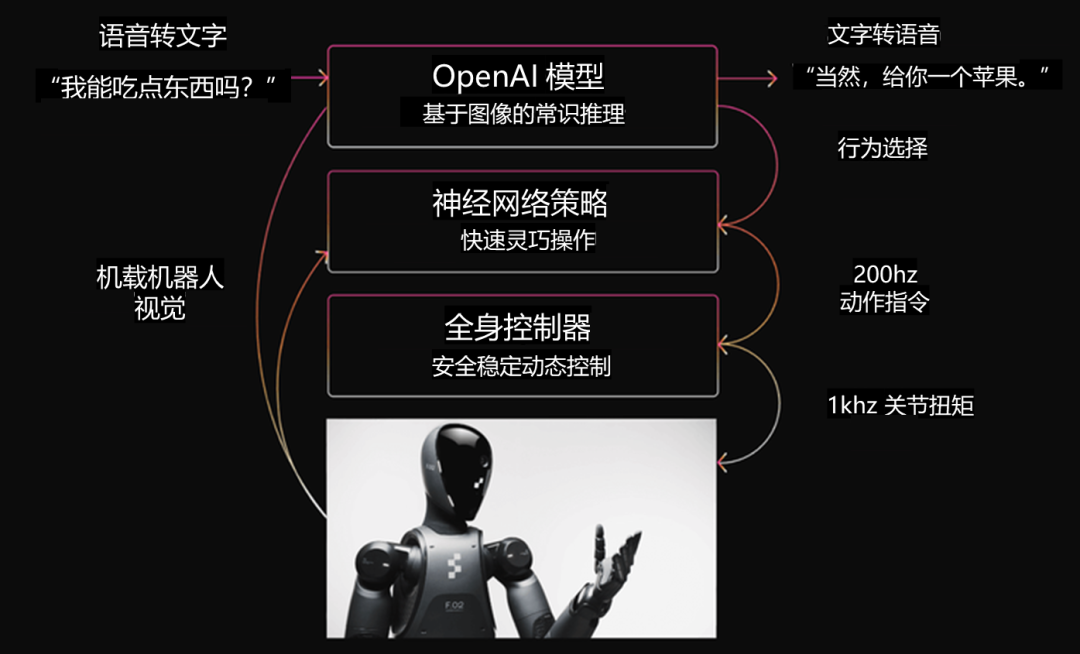
第二,多层次端到端的具身决策。由多模态大模型启发的,具有数理基础的认知与规划研究,与生命科学家的成果融合,并与实时的控制模块融合,可以显著增强
趋势三
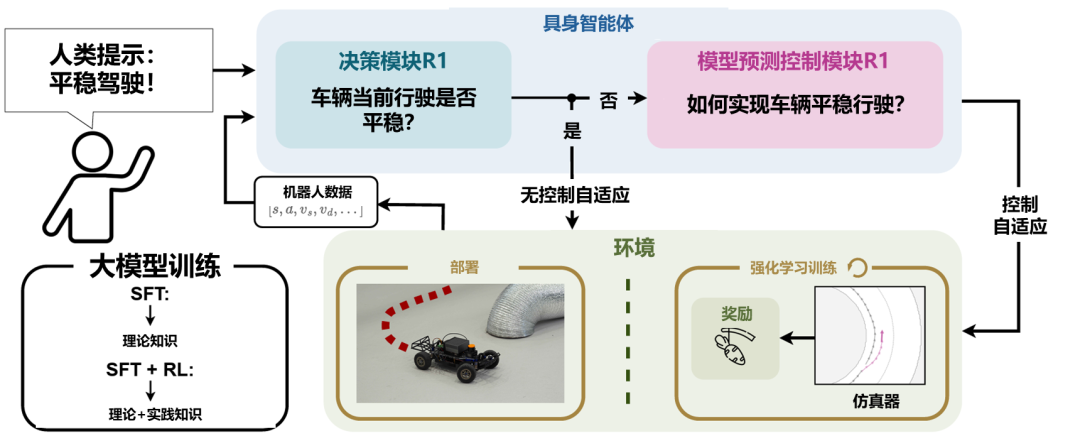
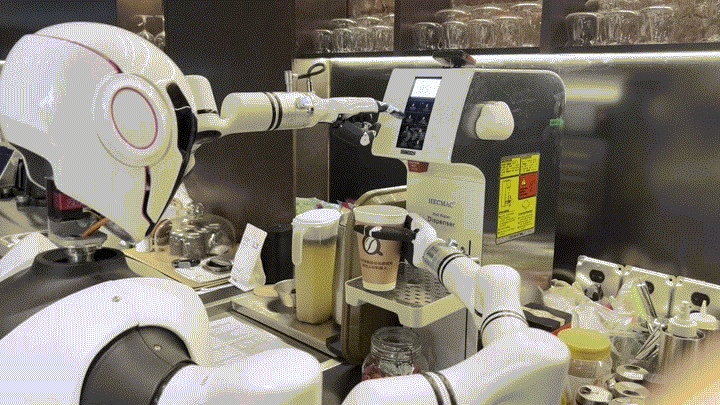
第三,从控制角度来看,可以融合模型预测、强
趋势四
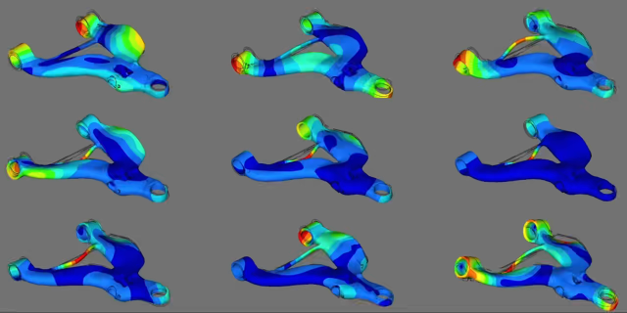
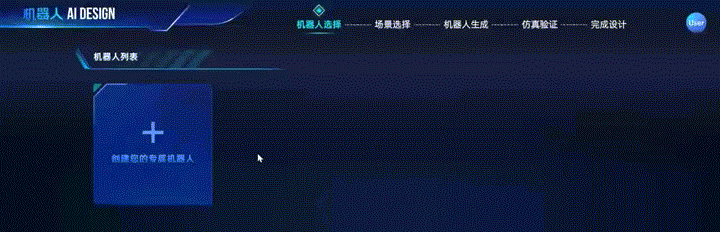
第四,生成式
趋势五
第五,高度协同与动态适配的

趋势六
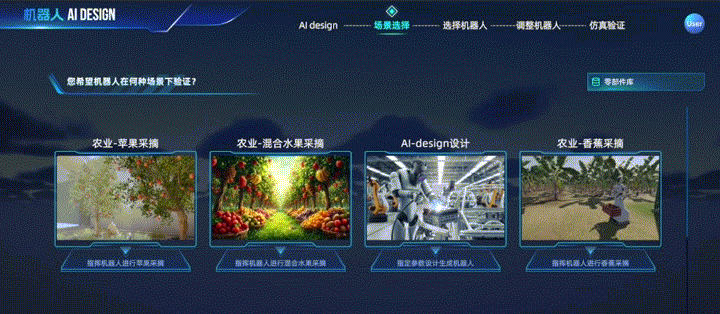
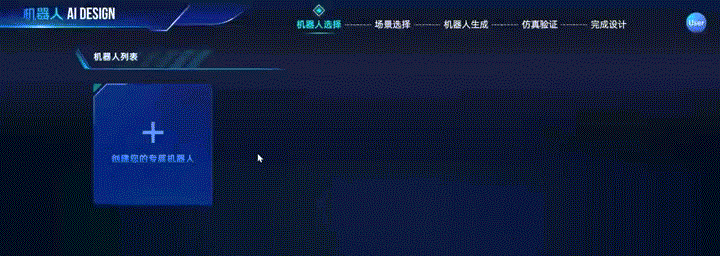
第六,
趋势七
第七,
趋势八
第八,

趋势九
第九,跨学科的
趋势十
第十,面向

10 Trends ofEmbodied Intelligent Robots
TREND 1Embodied Cognition Driven by the Synergy of Physical Practice, Physical Simulators, and World Models
Physical practiceis the essence of embodied intelligence.Physical simulatorsconstruct high-fidelity training environments, whileworld modelsprovide the internal characteristics of the environment. The integration of these three elements enables the creation of rich,effective and realistic environmentsfor training embodied intelligent robots in perceptual and cognitive abilities regarding both contact and non-contact interactions with the environment, laying a solid foundation for decision-making and control.
TREND2Empowering Embodied Decision-Making via Multimodal Large Model

Multi-level end-to-end embodied decision-making:Inspired by multimodal large models, the research on cognition and planning with mathematical and physical foundations, integrated with life sciences and combined with real-time control modules, significantly enhances the task generalization ability of embodied intelligent robots in unstructured environments.
TREND3Embodied Intelligent Control via Integrating Model Prediction, Reinforcement Learning and Life Sciences
By integrating the dynamic optimization capabilities ofmodel predictive control, adaptive strategies ofreinforcement learning, and theredundant multi-loop control mechanisms from life sciences, anembodied intelligent robot control systemis constructed to improve the generalization and adaptability of embodied intelligent robot control in dynamic environments.
TREND4Generative AI for Embodied Intelligent Robot Design

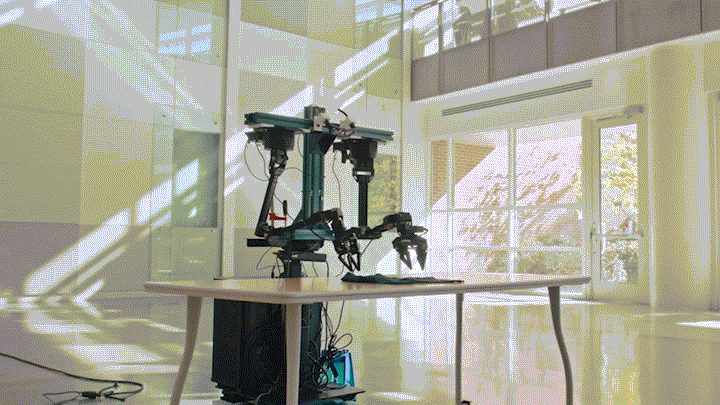
Generative AI-driven intelligent robot design realizes unified optimization of motors, reducers, drivers, structures, connectors, and materials. In combination with research and development technologies of robotic structure, itachieves co-optimization of hardware and control strategiesin physical simulators, enabling automatic exploration of task-optimal embodied intelligent robot designs.
TREND5Highly Synergistic and Dynamically Adaptive Software/Hardware Consistency for Embodied Intelligence
Embodied intelligent robots requireconsistent software/hardware co-design. By predefininginterface specificationsof algorithms during hardware development and embeddingphysical constraintsof hardware into algorithm design, system-level consistency and optimization are achieved through joint simulation and validation.
TREND6“Manufactory” of Embodied Intelligent Robots
In thesimulation environment, research and development efforts such as natural language interaction, environment generation, robot body design, decision-control algorithms, and software-hardware consistency algorithms are integrated into an organic whole, enabling rapid design and manufacturingof high-quality embodied intelligent robot systems according to specific performance and requirements.
TREND7Large-Scale and High-Quality Dataset for Embodied Intelligence
The construction oflarge-scale and high-quality datasets for embodied intelligencethrough physical entity collection and simulation synthesis can enhance embodied intelligent robots’ capabilities in morphological optimization, multimodal training efficiency, and cross-scenario policy transfer.
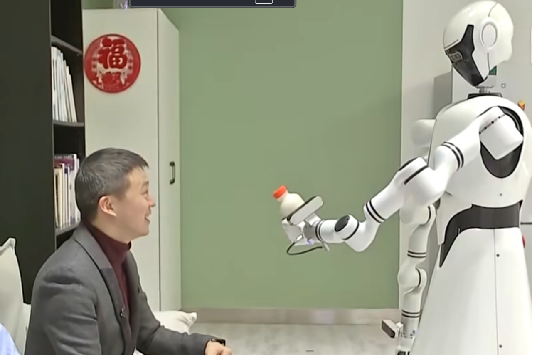
TREND8Advances in Embodied Intelligent Robot Swarms and the Collaboration with Humans
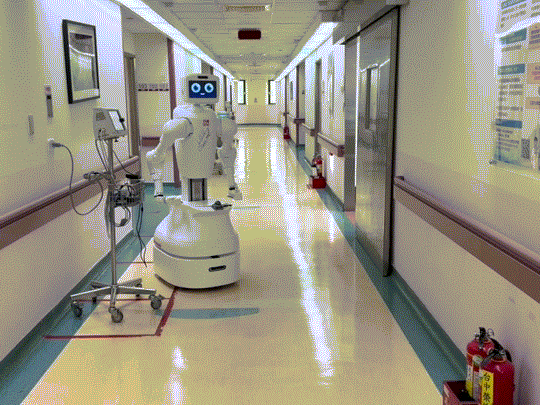
Integratingmulti-agent coordination mechanismsto construct embodied intelligent robot swarms, while continuously improving the safety of embodied intelligent agents and their ability to empathize with humans, will facilitate such robots’ entry into human society and realize their integration with humans.
TREND9Interdisciplinary Open Community for Embodied Intelligent Robots
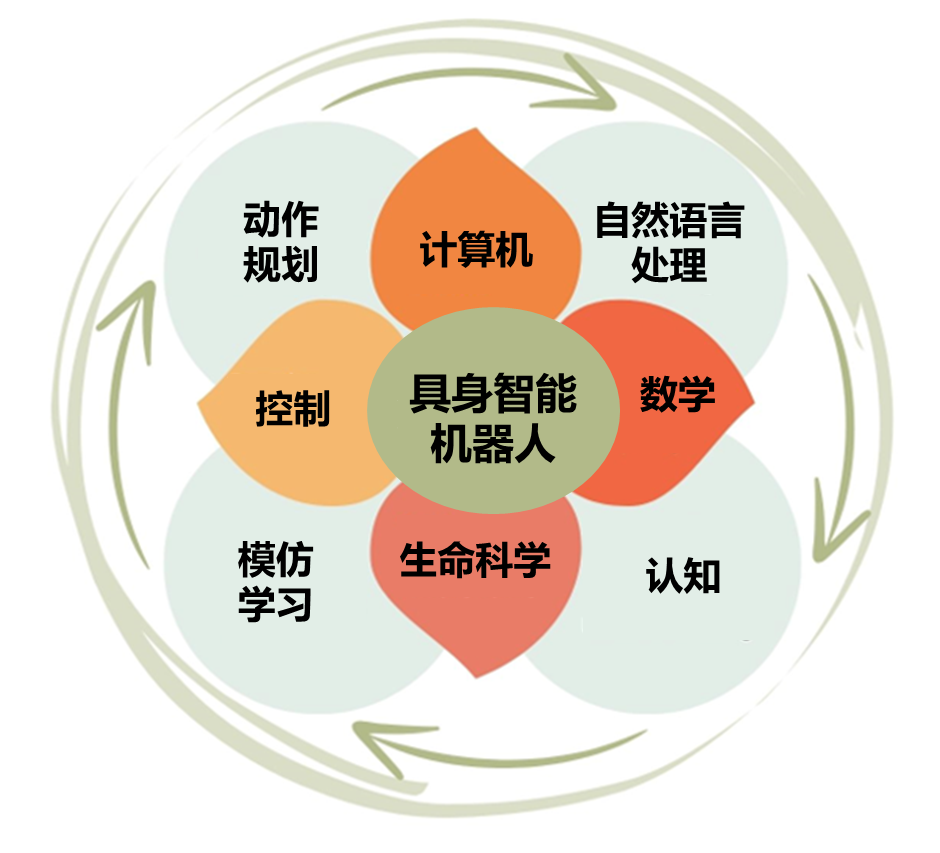
The development of embodied intelligent robots requirescollaboration across multiple disciplines, such as information sciences, engineering and materials sciences, mathematical and physical sciences, and life sciences. This initiative will bring together experts and scholars worldwide to promote technical discussions in the field of embodied intelligence, and facilitate in-depth integration and collaborative development throughout the industrial chain.
TREND10Safety Assessment and Ethical Development for Embodied Intelligent Robots

Throughbehavior norm verification,decision interpretability analysis, anddata security research, a safety assessment framework and ethical norms for embodied intelligent robots will be established to ensure decision reliability and behavioral safety in complex and open environments.